OpenDCC GBM16: BiDi/Détecteur de présence
Introduction
 Ce projet comprend un détecteur de présence voie jusqu'à 64 par groupe de 16 qui intègre le système BiDi.
Les restrictions précédentes liées à la combinaison de détection de présence et Railcom® n'existent plus.
Une grande puissance de calcul intégrée et de multiples interfaces permettent une exploitation complète du potentiel de BiDi. Pour la détection BiDi, une toute nouvelle approche basée sur la théorie des systèmes et de traitement du signal numérique a été introduite.
Ce projet comprend un détecteur de présence voie jusqu'à 64 par groupe de 16 qui intègre le système BiDi.
Les restrictions précédentes liées à la combinaison de détection de présence et Railcom® n'existent plus.
Une grande puissance de calcul intégrée et de multiples interfaces permettent une exploitation complète du potentiel de BiDi. Pour la détection BiDi, une toute nouvelle approche basée sur la théorie des systèmes et de traitement du signal numérique a été introduite.
Le PC et la station DCC-commande font parti de ce nouveau concept: le PC est capable de récupérer des informations détaillées sur la situation réelle de chaque locomotive, tandis que la station de commande peut suivre quelle loco a déjà reconnu des commandes DCC et à son tour, est capable d' effectuer une optimisation du signal de DCC à être envoyé sur le réseau. En outre, les décodeurs renvoient des informations sur la vitesse réelle et ceci peut aider à améliorer la précision de simulations temps-distance au sein des applications logicielles pour PC.
Pourquoi cela est-il utile? Le programme de contrôle doit déjà savoir - sur la base de son suivi des trains - où chacun des trains se trouve. L'information sur l'orientation de chaque train peut être vérifiée visuellement. Alors pourquoi BiDi et la détection de l'orientation?
Un exemple simple va vous le démontrer: Imaginez une exposition de modélisme de train avec une présentation grand club. Tout tourne bien, il y a 60 trains en marche. Soudain, un plantage du programme de commande (ou quelqu'un éteint tout en trébuchant sur le câble d'alimentation ou actionne accidentellement l'interrupteur principal) - Bang! - Le chien de garde entre en action et tout est en panne. Redémarrer le PC est facile, mais l'état actuel train <-> piste est perdu. Quelqu'un a besoin de ramper sous le circuit, vérifier les états, et de dire à quelqu'un d'entrer l'information. Avec BiDi, ce n'est plus nécessaire, mais seulement BiDi avec détection de direction vous permet de ne plus ramper!
Caractéristiques
- 16 entrées de capteur, pouvant chacune admettre un courant constant max. de 3A, pics jusqu'à 4A.
- Le retour BiDi et les capteurs de voies du détecteur de présence sont intégrés dans un composant, la chute de tension est extrêmement faible de seulement 0,3 V sur la voie (Note sur la disponibilité des BiDi: voir FAQ)
- Alimentation sans supplément nécessaire (alimentation de la voie principale, faible consommation).
- Affichage local de l'occupation actuelle et l'existence du trafic bidis par LED intégré.
- Affichage de l'état actuel (Puissance, relié, message) avec LEDs
- Seuil du statut d'occupation configurable.
- Figer au cas où le poste de commande est arrêté.
- Rapport d'échec Booster.
- adresse de rétroaction configurable
- Configurable par DCC or USB
- En option: boucle terminale intégrée en utilisant des capteurs sur rails
- Optocoupleur intégré, alimentation entièrement séparé de la station et PC
- Connexion à un PC via un port USB, à la station centrale via BiDiBus, XPressNet ou S88-N. PC et station centrale peuvent être connectés simultanément.
- Détection de présence:
- mesure de puissance indépendante sur chaque voie d'entrée, détection particulièrement rapide par mesure parallèle
- sensibilité configurable
- Haute sensibilité, suffisante pour la résistance utilisée dans les axes de roues
- protection contre le scintillement par filtrage intelligent de la mesure de courant
- La mesure est possible avec une alimentation auxiliare sans présence de station de commande.
- BiDi:
- Interprétation intelligente de BiDi sur les 16 canaux utilisant des détecteurs locaux, avec des canaux multiples et en parallèle. Ceci permet une identification des trains (CH1-messages) sur les voies nouvellement occupées et en parallèle une analyse indépendante des voies déjà occupées.
- algorithme intelligent pour la cartographie des détecteurs locaux - près de 100% de détection des réponses BiDi.
- détection intégrée de direction pour chaque locomotive RailCom, même avec plusieurs locomotives sur un tronçon de voie
- Identification spécialisée des bits avec des filtres et "eye-detection" permettant de détecter même avec des messages très perturbés
- détection simultanée de plusieurs locomotives sur une section dont la direction et l'adresse.
- GBM16T unité de base et GBM16C pour les entrées de 16 signaux (même référence de tension), extensible à 64 entrées avec jusqu'à 3 unités d'extension (16 entrées ayant même référence de tension, unités d'extension avec tensions mutuellement séparées).
- Jusqu'à 16 circuits peuvent être combinés dans un grand système de rétroaction.
- Extensions:
16-fold track sensor avec interface: 80 x 100mm 16-fold track sensor extension (GBM16T):
(max. 3 unités d'extension peuvent être connectées)52 x 100mm
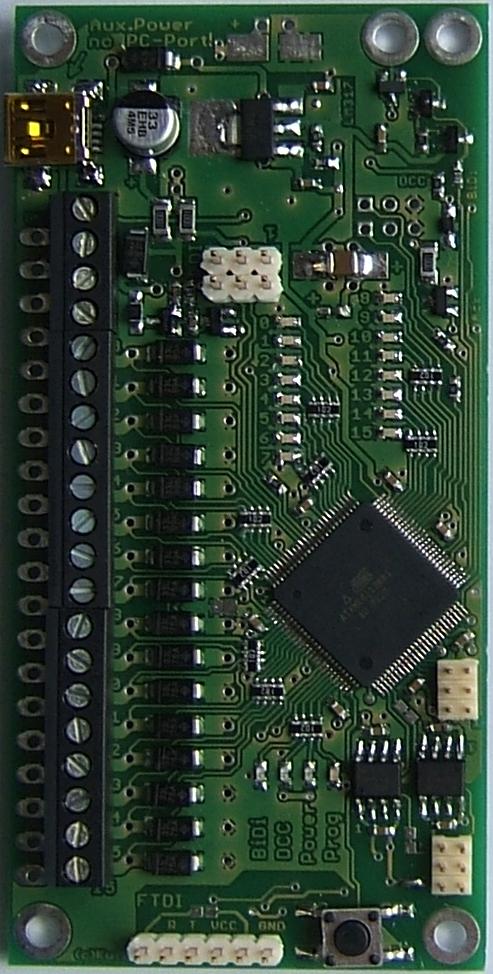
Implantation
-
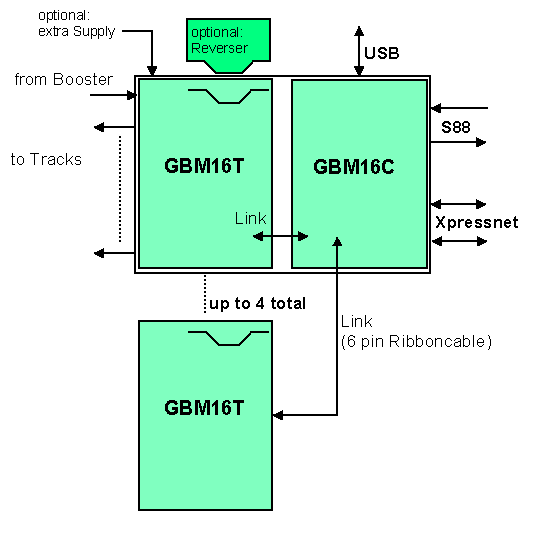
GBM se compose de deux modules, un module détecteur (GBM16T, T='trackproc')
et un module de commande (GBM16C, C='controlproc').
Les modules sont sur le même circuit imprimé, mais peuvent être séparés et connectés par un câble à 6 broches.
Le module de commande peut contrôler jusqu'à trois modules détecteur
(quatre au total) qui sont connectés par un câble à 6 broches.
{kind=link}
Le module détecteur est alimenté à partir du signal DCC et prend en charge la détection sur la voie (en utilisant la mesure de courant) et l'analyse BiDi. Le module de commande communique avec le PC et en parallèle avec la station de commande. les deux modules interagissent grâce à une liaison de données rapide.
Connecteurs
- Entrée DCC depuis le booster
- Sortie DCC vers la voie, avec simple ou double (recommandé) connexion des rétroactions à la voie. Les connections sont disponibles ou on peut utiliser des prises avec bornes à vis. (Système RIACON 3,5).
- alimentation supplémentaire via mini-USB B (en option, à séparation galvanique (!)) ou bornes à vis. Important: une tension isolée doit être appliquée, elle ne peut être ni à la terre, ni la tension à la tension d'alimentation de la station centrale.
- Xpressnet over RJ12, deux Socket pour faciliter l'intégration du système
- S88-N, RJ45, entrée et sortie
- USB, via le port COM virtuel pour une rétroaction directe au PC. Différents types de protocoles peuvent être émulés.
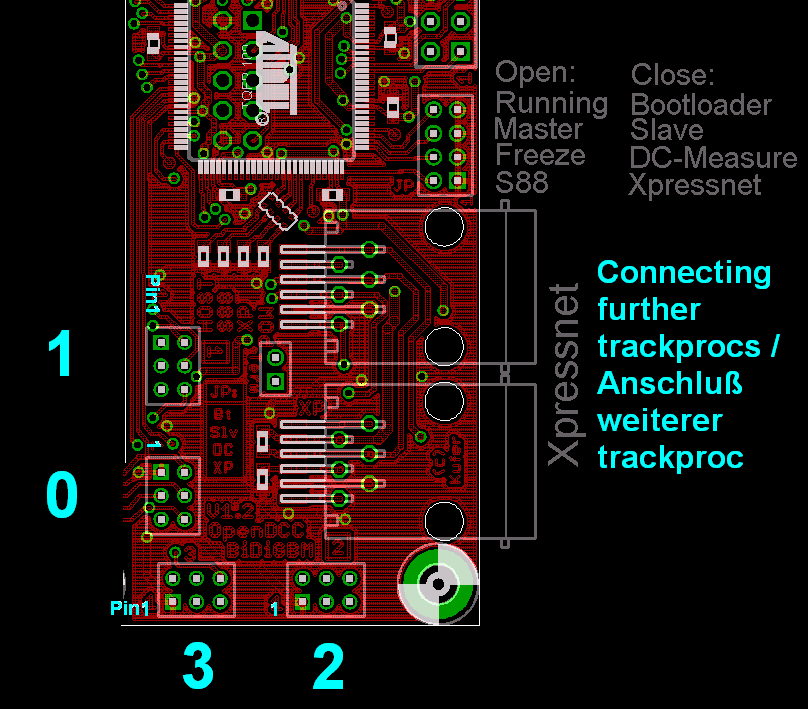
Signalisation
-
GBM16T (Trackproc) a 16 + 4 LEDs pour afficher son statut:
- LED ALIMENTATION:
Ce voyant est dans l'état normal avec une luminosité normale (50%). A chaque fois qu'un message est envoyé à la Controlproc (par exemple un changement d'état), la luminosité est augmentée pendant une courte période. - LED DCC:
Si aucun signal DCC n'est présent, le voyant clignote à toute vitesse. Si un signal DCC est détecté, le voyant est en grisé (50%).. - LED PROG:
Si le GBM est en mode de programmation, le mode correspondant est affiché ici. - LED BIDI:
Lorsque le signal d'entrée contient un intervalle de suppression du signal , la LED est faiblement éclairé. Si un feedback de la voie a été reconnu, le voyant clignote momentanément. - LED POWER:
Ce voyant est allumé avec une luminosité réduite (50%), un code clignotant apparaît lorsqu'une erreur survient. - LED XP:
Si XP n'est pas connecté, le voyant reste éteint. Si XP est branché et connecté, la LED est à la luminosité normale (50%), un code clignotant apparaît lorsqu'une erreur survient. - LED S88:
Si S88 n'est pas connecté, le voyant reste éteint. Si S88 est branché et connecté, la LED est à la luminosité normale (50%), un code clignotant apparaît lorsqu'une erreur survient. - LED MSG:
LED clignote si le GBM envoie des messages de présence.
GBM16C (controlproc) a 4 LED for pour afficher son statut::
Utilisation
Le GBM peut générer un message d'occupation ou des messages étendus comme Adresse, CV ou la vitesse actuelle. En fonction de votre connexion et du protocole émulé, il y a plusieurs choses à considérer:
Présence:
-
Pour la transmission du rapport d'occupation, les options suivantes sont disponibles:
- Transmission via le bus S88:
S88 est un registre à décalage série simple, sans adressage explicite. L'adresse d'une unité de rétroaction résulte simplement de sa position dans la chaîne.
Le GBM16C est inséré à l'emplacement souhaité dans la chaîne de répéteurs de bus S88 et représente un certain nombre de d'emplacements de détecteur selon l'emplacement choisi. A la mise sous tension le GBM16C vérifiée le nombre de modules trackcontroller GBM16T connectés. Pour chaque GBM16T détecté 16 S88 bits-de-rétroaction sont générés. Ceux-ci sont insérés dans l'ordre dans lequel ils sont identifiés dans le flux S88. Si aucun GBM16T n'est relié à une interface, alors aucun S88 bits-de-rétroaction n'est généré.
-
Exemple: Deux GBM16T sont connectés à un GBM16C sur l'interface 0 (celui qui est cablé) et l'interface 22:
32 S88-bits sont utilisés, dont les 16 premiers pour le GBM16T sur l'interface 0 et les seconds
16 bits pour le GBM16T sur l'interface 2. GBM16C utilise 32 slots de détection.
- Transmission via Xpressnet Bus:
Les messages BiDi et les messages d'occupation peuvent aussi être envoyés via le bus XPressNet. A cet effet, de nouvelles et efficaces commandes sont utilisés, cette fonction fonctionne seulement avec une station centrale OpenDCC, un autre terminal XPressNet ne comprendra pas ces commandes.
L'attribution de l'adresse du module de détection a lieu via l'adresse de retour du GBM16T. Ceci a l'avantage que l'adresse peut être librement sélectionnée et ainsi que même pour un changement ou extension du système de répéteur elle est conservée. L'adresse n'est pas non plus dépendante du câblage ou d'une adresse de bus, XPressNet. L'inconvénient est que vous avez à faire l'attribution de l'adresse elle-même (et cela peut faire des erreurs).
... Manque du texte ici...