OpenDCC GBM16, détecteur de présence, configuration et intégration
-
Cette page décrit en détail, l'exploitation et l'intégration du détecteur de présence. Les valeurs par défaut peuvent être utilisées directement sans réglage complémentaire.
Toutefois, si vous souhaitez modifier certaines propriétés, des ajustements sont nécessaires. Une affectation ultérieure d'adresse est requise selon le protocole de contre-réaction utilisé.
Affectation d'une adresse au détecteur de présence
-
GBM16 peut utiliser plusieurs chemins parallèles pour transmettre les messages de "feedback", l'attribution de l'adresse varie en fonction du support:
- S88:
Pour le protocole S88 l'attribution d'adresse est tout simplement la position physique dans la chaîne de répéteur, il n'y a pas d'ajustement nécessaire. - Xpressnet:
Chaque module de détection GBM16T connecté à un module de commande GBM16C utilise son identifiant (DID) en tant que base des adresses. A partir de là, le module de commande trie les messages de ce processeur de voie en conséquence dans l'espace d'adressage du "feedback". (16 bits pour chaque module de détection connecté, en partant de 0 et en sautant les interfaces ouvertes). - Interface hôte:
Plusieurs protocoles d'émulation peuvent être utilisés. Pour chacun d'eux (sauf BiDiB) les informations précédentes données pour Xpressnet s'appliquent: Les messages de présence voie sont traités en fonction du DID du module détecteur de présence relié au module de contrôle.
Avec le protocole BiDiB, toutes les adresses sont affectées automatiquement sans besoin de configuration complémentaire.
Affectation d'adresses et identification des GBM
- l'adresse DCC: l'adresse "aiguillage" du décodeur d'accessoires intégré.
- l'adresse de feedback: l'adresse utilisée pour transmettre les messages du détecteur à la station central ou au PC. Note: en utilisant le protocole BiDiB l'adresse de feedback est affectée automatiquement. Les deux adresses sont acquises avec la méthode dite "bouton poussoir": Le GBM16T est mis en mode programmation, puis avec la station centrale l'adresse souhaitée est envoyée comme une commande d'aiguillage.
- mode Identification:
Lorsque vous appuyez brièvement sur le bouton, le GBM passe en mode d'identification. Dans ce mode, tous les indicateurs clignotent; Le test standard d'occupation de voie est désactivé. Les bits de détection respectifs peuvent être facilement identifiés et contrôlés sur le PC ou la station de commande. Un autre appui court sort du mode d'identification de la GBM. - mode Programmation :
Lors d'un appui long sur le bouton, GBM entre d'abord dans le mode d'identification ( les LEDs "track sensors" clignotent), puis GBM entre en mode programme , qui est identifié par la PROG LED clignotant rapidement de même que les "track" LEDs. Au début ce mode est en apprentissage d'adresse DCC signalé par le clignotement de la LED DCC. Dès qu'une adresse accessoire a été reçue, cette LED arrête de clignoter et reste allumée en permanence. Les adresses 1-4 sont utilisées comme adresse de base pour le GBM (voir les détails du décodeur OpenDecoder pour plus d'informations)
Avec un autre appui court: Le GBM reste en mode programmation mais en "Feedback-address learning mode" cette fois, indiqué par une POWER LED clignotante. Une fois l'adresse accessoire reçue, cette LED arrête de clignoter et reste allumée en permanence et l'adresse modulo 8 est utilisée comme adresse de feedback.
Avec un autre appui court: Le GBM reste en mode programmation, mais revient en "DCC-address learning mode".
Un appui long fait sortir le GBM du mode programmation.
GBM16T contient la partie de détection de présence et un décodeur d'accessoire DCC qui n'est pas nécessaire pour la fonctionnalité de détection mais permet la configuration de l'accès par une variable de configuration (CV). Il y a donc deux adresses à paramétrer:
Configuration de l'unité de détection GBM16T
-
Le GBM16T peut être configuré de trois manières différentes:
- DCC: Le GBM16T peut être programmé comme un décodeur accessoire standard: l'affectation d'adresses est effectuée avec la méthode dite "bouton poussoir (voir OpenDecoder), les variables interne peuvent être consultés en mode de programmation ou en mode PoM (program on main).
- GBM16C: par l'interface USB du system de feedback il est possible d'accéder a un GBM16T en particulier et de modifier ses propriétés.
- FTDI-RS232: Optionnellement GBM16T a une interface pour la configuration et la mise au point. Cet interface est accessible via un connecteur 6 broches situé à l'extrémité inférieure. Le brochage est conforme à la norme FTDI USB-RS232 (3V3 or 5V, deux cas sont possibles). Les paramètres sont 115200 Baud, 8N1. Une liste de commandes peut être trouvée en tapant? <cr>.
CVs du module détecteur GBM16T (T='trackproc')
-
Le comportement du détecteur de présence peut être configuré en utilisant des variables de configuration (CV). En général les valeurs par défaut conviennent, seule l'adresse du GBM1T doit être configurée. La sensibilité des entrées et le comportement temporel peuvent être configurés avec des CVs.
- CV33: Mode décodeur
Le détecteur peut être équipé d'une boucle de retour automatique optionnelle. elle peut également être activée via la commande DCC: car c'est l'adresse du décodeur (voir OpenDecoder) et le mode de décodeur approprié. Preset 200Valeur Signification 200 Contrôle d'une boucle de retournement avec commande automatic des commutateurs à l'adresse cartographiée. 201 Contrôle direct de la boucle pour des besoins de test seulement
- CV34: Mode Opération
Ce CV défini le mode opératoire du module de détection. Default 0.Valeur Signification 0 Optimisé pour DCC - CV35: Cavalier
Ce CV contient la position des cavaliers de configuration sur la carte (lecture seulement).Bit Signification 0 cavalier 1, en bas, Bootloader 1 cavalier 2, milieu, (réservé) 2 cavalier 3, en haut, (réservé) - CV36: Alimentation
Ce CV définit si une alimentation externe peut-être utilisée en cas de défaut du booster.
Note: De façon à utiliser une alimentation externe, les conditions suivantes doivent être remplies:Valeur Signification 0 ne pas utiliser d'alimentation externe 1 utiliser une alimentation externe de 10mA en cas de défaut du booster - La source d'alimentation de secours doit être disponible et le cavalier R27 (SJ) doit être fermé.
- Une alimentation séparée pour le GBM1T doit être disponible.
- Les moteurs de locomotives très sensibles (comme les Faulhaber) peuvent "kriechen" (very slow motion, also snakes do this.).
- CV40: Detector-ID bit poids faible
Ce CV (en combinaison avec CV41) contient 'ladresse de base du module de détection. Il est utilisé pour définir l'adresse lors de l'emploi d'un système de bus qui supporte l'adressage. Le CV contient les bits d'adresse réelle qui sont multiples de 8. - CV41: Detector-ID bit poids fort
Ce CV (en combinaison avec CV40) contient l'adresse de base du module de détection. - CV42: temps de latence, retard d'activation
Ce CV définit combien de fois un dépassement de seuil doit être détecté avant de déclarer une présence. Ceci permet de filtrer les parasites comme ceux provoqués par l'allumage d'une lampe fluorescente dans la salle).
default: 5 - CV43: temps de maintien
Ce CV indique combien de temps une détection de présence est maintenue. Ceci pour éviter un scintillement de la détection due par exemple à de mauvais contacts.
unit: 100ms
default: 15 (=1,5 sec) - CV44: Seuil d'entrée active
Ce CV définit le seuil à dépasser pour considérer une voie comme occupée.
unit: approx. 0.5mV
default: 10
Note sur la sensibilité: En utilisant une résistance de 22 ohms, un courant de 22uA produit une tension de 0,5mV. La valeur par défaut de 10 reflète donc un courant de 220uA. En utilisant la tension DCC de 12V, un wagon avec une résistance d'axe de 50k déclenche l'occupation de la voie.
En cas de fausse détection (causée par exemple par une fuite de courant due à l'humidité), La valeur par défaut doit être accrue. - CV45: Seuil d'entrée inactif.
Optionnellement, le détecteur de présence peut fournir sur les sorties voies en parallèle une source de courant de remplacement de 10mA en cas d'une entrée inactive. Ce CV défini le seuil de détection de présence pour de telles entrées inactives.
unit: approx. 0.5mV
default: 5
- CV46: Boucle de retournement
Ce CV définit comment les sorties d'une boucle de retournement sont connectées. - CV47: Boucle de retournement, condition de déclenchement de l'activation, bas
Dans ce CV on inscrit quelles présences déclenchent la Boucle de retournement. Ce lien 0 ... 7, bit 0 correspond détecteur 0, bit 1 correspond à détecteur 1, etc; Un bit positionné indique que la détection de présence actionne la Boucle de retournement.
Par défaut: 0 - CV48: Boucle de retournement, condition de déclenchement de l'activation, haut
Dans ce CV on inscrit quelles présences déclenchent la Boucle de retournement. Ici le lien (port) 8 ... 15.
Par défaut: 0 - CV49: Boucle de retournement, condition de déclenchement de la désactivation, bas
Dans ce CV on inscrit quelles présences éteignent la Boucle de retournement. - CV50: Boucle de retournement, condition de déclenchement de la désactivation, haut
lien 0 ... 7
Par défaut: 0 - CV51:position inversée de noeuds
Dans ce CV on inscrit la position actuelle du noeud inversé. Ce CV peut seulement être lu.
Par défaut:0 - CV52: Echelle
Dans ce CV on inscrit l'échelle utilisée pour la mesure de vitesse. Par exemple pour l'H0 (1/87) est inscrit 87, N:160, TT:120N:160, TT:120
Par défaut:87 - CV53: Longueur de l'espace de mesure, bits poids faible
Longueur = CV54 * 256 + CV53. Unité le millimètre.
Par défaut:232 (=1000mm/256) - CV54: Longueur de l'espace de mesure, bits poids fort
Voir CV53
Par défaut:3 (=1000mm/256) - CV55: Départ de la mesure, bits poids faible
Dans ce CV on inscrit quelles occupations démarrent la mesure. Ici le port 0 ... 7; le bit 0 correspond au détecteur 0, le bit 1 correspond au détecteur 1, etc. un bit positionné à un signifie qu'une occupation du détecteur correspondant démarre la mesure.
Par défaut:2 - CV56: Départ de la mesure, bits poids fort
Voir CV55
Par défaut:0 - CV57: Arrêt de la mesure, bits poids faible
Dans ce CV on inscrit quelles occupations arrêtent la mesure. Ici le port 0 ... 7; le bit 0 correspond au détecteur 0, le bit 1 correspond au détecteur 1, etc. un bit positionné à un signifie qu'une occupation du détecteur correspondant arrête la mesure..
Par défaut: 4 - CV58: Arrêt de la mesure, bits poids fort
Voir CV 57
Par défaut:0
| Bit | Signification |
|---|---|
| 0 | 0: aucun contrôle via DCC 1:Kehrschleifenstellung wird per DCC-Weichenbefehl geschaltet. (CV33 muß hierzu auch auf 200 stehen, damit der DCC-Befehl auch entsprechend interpretiert wird) La position inversée des noeuds est commutée par ordre mou de DCC. (CV33 doit se trouver aussi sur 200 pour que l'ordre de DCC soit interprété en conséquence) |
| 1 | 0: aucun contrôle par rapport à l'occupation 1: La Position de la boucle de retournement est commutée sur rapport d'occupation. Le détecteur d'occupation de déclenchement peut être sélectionné avec les CV suivants. |
Exemple de boucle de retournement
- La longueur de l'espace de mesure doit être connue du GBM16T : la longueur est inscrite en millimètre dans CV53 et CV54 sur 16 bits. Longueur = CV54 * 256 millimètres + CV53.
- Pour que la conversion de vitesse à l'échelle soit correcte, l'échelle doit être inscrite dans CV52. La valeur par défaut 87 correspond à H0.
- Ensuite, les positions de synchronisation doivent être définies: Lorsque la locomotive pénètre dans la section de mesure et lorsque la section de mesure est dépassée. Supposons que la locomotive se tenant dans la section 0, la section d'essai est la section 1 et la locomotive entre après l'espace de mesure dans la section 2. Ensuite Entrer dans la section 1 (ie la section d'essai elle-même) donne l'heure de début, entrer dans la section 2 marque la fin de la mesure. Chaque détecteur nécessaire pour début et la fin de mesure sont indiqués dans le CV55/CV56 et CV57/CV58.
- Cette fonction doit être activée. La commande V Active l'affichage de la vitesse.
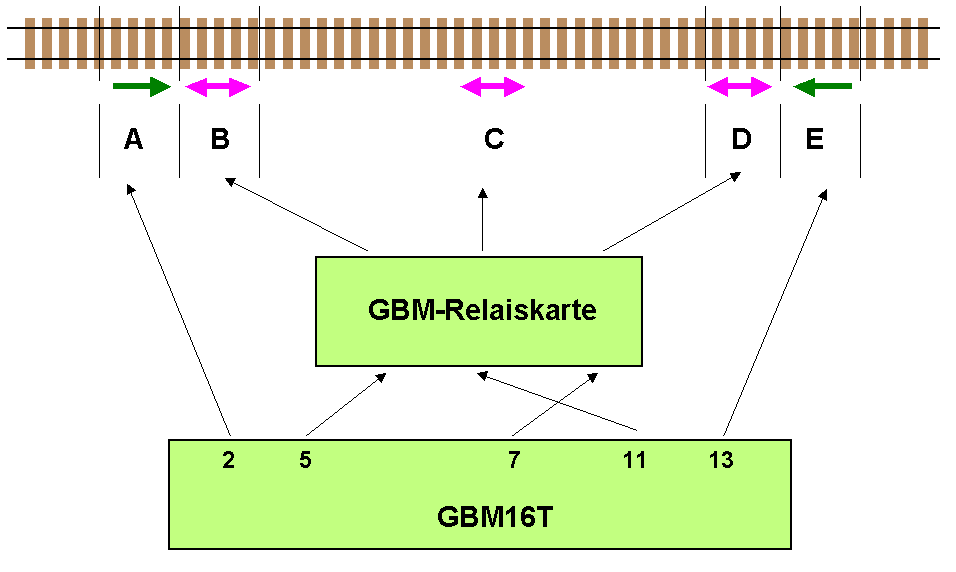
L'exemple montre une piste composée de cinq sections. Section A est reliée à une polarité (appelée «droite»), B, C et D peuvent être inversés et la section E est connectée en polarité opposée (nommé «gauche»). Un événement d'occupation dans les sections A ou B est un événement déclencheur pertinent pour passer sections B, C, D à 'droite', D ou E sont les conditions de déclenchement pour passer sections B, C, D à «gauche».
Si un train entre maintenant dans A, les sections B, C, D sont commutées 'à droite' et le train peut entrer sans problèmes. Si le train atteint la section D, les sections B, C, D sont commutées 'à gauche' 'et le train peut sortir sans problème. Dans la direction opposée, E déclenche le changement de sens de la liaison et ensuite B déclenche le changement de sens.
Câblage: les sections intermédiaires sont dirigées sur la carte-mère de relais, celle-ci assure le renversement de polarité. Ensuite, toutes les sections sont câblées sur le GBM16, chaque section peut être câblée indifféremment sur n'importe quelle entrée. Dans l'exemple sont connectés, A sur 2, B sur 5, C sur 11, D sur 7 et E sur 13.
Réglage des CVs: Les détecteurs A et B (à savoir, 2 et 5) pour déclencher l'activation de la boucle de retournement, donne le modèle de bit suivant pour CV47 et CV48 (bits et les détecteurs sont chacun compté à partir de 0)::
| CV48 (On, bits de poids fort) | CV47 (On, bits de poids faible) | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 |
| Défaut: 0 | Défaut: 36 | ||||||||||||||
| CV50 (On,bits de poids fort) | CV49 (On,bits de poids faible) | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Défaut: 32 | Défaut: 128 | ||||||||||||||
Info : S'il est souhaitable que la section centrale C se compose de plus d' une section de signalisation (par exemple parce qu'on a besoin dans la surveillance de la circulation des trains), alors on peut faire commuter au moyen d'un autre module de relais jusqu'à trois sections de signalisation. Cela n'a pas d'influence sur la fonction. Il est important que toutes les sections soient connectées sur le même GBM .
Astuce: Dans l'interface de débogage du Trackproc vous pouvez laisser sur la fenêtre de sortie de la commande R pour afficher l'affectation des canaux de déclenchement des inverseurs et l'affectation actuelle. # A la fin de la ligne indique la position actuelle de la boucle de la borne. Et avec les commandes RA (= ajouter) ou RM (= supprimer), vous pouvez supprimer des sections de détection individuels de la condition de déclenchement. Que vous enregistrez à convertir les valeurs de CV.
Mesure de la vitesse
-
Le GBM16T a une base de temps précise et un système d'acquisition rapide. Il est facile de comprendre que l'on puisse intégrer de suite une mesure de vitesse. Ainsi, on peut contrôler directement la vitesse annoncée par le décodeur de Railcom correspondant et régler correctement le CVs adéquat dans le décodeur de locomotive. (Inclus dès la VERSION 1.3 de GBM16T)
Vitesse v = l / t, en s'appuyant sur la longueur de la maquette du train mis à l'échelle. Les entrées suivantes sont donc nécessaires:
Intégration
-
Les messages de Trackproc (GBM16T) sont collectées à Controlproc (GBM16C) et transmises à l'interface hôte par:
- USB
- Xpressnet
- S88 Les paramètres de configuration de GBM16C définissent quelle 'information est transmise par l'interface.
Controlproc GBM16C - Interface USB
-
Controlproc est muni d'une interface USB utilisé pour les messages et les mises à jour du firmware ce qui facilite également la configuration. La communication sur cette interface utilise un Port de communication virtuel.
Mise à jour du Firmware
-
Si le cavalier de démarrage est en place lors du démarrage du décodeur, le "bootloader" est activé une mise à jour du firmware peut être effectuée. Le voyant est allumé en permanence au début et clignote à chaque octet transféré. Bootloader utilise AVROSP-protocole à 19200 bauds, 8N1. Pour plus d'informations, consultez le manuel de construction de la souris.
Configuration de l' interface
-
En fonctionnement normal, une interface de commande (API) est mise en œuvre sur le port USB par laquelle vous pouvez envoyer des commandes au décodeur. A cet effet on peut utiliser un simple émulateur de terminal comme hterm.
L' API utilise un protocole série à 115200 Baud, 8 Bit, pas de parité, 1 stopbit (8N1). 8-Bit ASCII sont transmis, l'API n'est pas sensible à la casse. Toutes les commandes transmises sont terminées par <cr> ou <CR-LF>, les réponses utilisent <CR-LF> comme une terminaison. Aux commandes inconnues l'interface répond par "commande inconnue".
Commandes API
- Help
paramètre: aucun
réponse: un texte d'aide avec une brève description. - Info
paramètre: aucun
réponse: "OpenDCC_BiDiGBM hw 1.0, sw 02, api 01" (exemple)
La Réponse est une chaîne de caractères à partir de l'identifiant matériel ("OpenDCC_BiDiGBM), suivi des numéros de version. Les mots clés suivants sont éventuellement retournéshw Hardware-Version sw Software-Version api Numéro de version de l'analyseur(parser) pouvant être utilisé pour déterminer l'ensemble de commande supporté. - EH
paramètre: aucun
réponse: running HSI88 Emulation
GBM bascule du E Debugmode en mode HSI88 d'émulation. HSI88-mode peut être quitté avec la commande 'X'. Remarque: Les paramètres de connexion ne sont pas modifiées lors du passage à HSI88, ce mode utilise encore 115200 Baud (Et non 9600 comme l'original HSI88). Parfois, vous devez configurer le programme d'accueil en conséquence, par exemple, à TC avec UseCommDefaults. - EB
paramètre: aucun
réponse: running BiDiB Emulation
Le GBM commute en permanence du Debugmode en émulation de BiDiB. - REBOOT
paramètre: aucun
réponse: aucune
Le décodeur effectue une réinitialisation (par exemple nécessaire après le changement des modes de CV - XER ADDR
Lecture de l'adresse de l'EEPROM (par exemple XER 0x34) - XEW ADDR DATA
Écriture à l'adresse EEPROM (par exemple XEW 0x34 0x45)
- !!! texte manquant ici!!!
Commands en mode émulation HSI88
-
Le GBM OpenDCC peut émuler l'interface hôte 88 de Littfinksi (LDT).
Il existe deux modes de fonctionnement pour HSI 88: binaires et ASCII. En mode binaire, les adresses et les données sont transmises en tant que unsigned int8, tandis que le mode ascii transmet des informations au format hexadécimal composé de deux caractères sans préfixe (par exemple 0F). LDT utilise le mot terminalmode pour modes de fonctionnement.
- v <cr>
réponse: Ver. 0.01 / 14.10.10 / HSI-88 / OpenDCC <cr>
Demande de version de la "chaîne noyau 'HSI-88, tous les composants de la chaîne peut modifier la longueur. (request version information, apart from the 'core' HSI-88 all parts of the réponse may be subject to future changes (as is the length of the string as well)). - t <cr>
réponse: t[MODE]<cr>
Commutation du mode de fonctionnement (mode terminal). La commande commute le mode, au démarrage la valeur par défaut de l'émulation est binaire. MODE = '0 'signifie binaire, MODE = '1' signifie ascii. - s [LINKS][MITTE]RECHTS]<cr>
réponse (part 1): s[SIZE]<cr>
Cette commande définit la taille des sous-chaînes respectives(ou des parties de celles-ci) dans les modules de chacun 16 bits . OpenDCC GBM ne considère que le montant total de modules, qui est renvoyé dans la taille.
Selon le mode de fonctionnement, à la fois les paramètres et la réponse sont binaire ou ASCII.
La deuxième partie de la réponse contient le message initial (voir ci-après), pour chacun des modules.
Cette commande doit être lancée une fois au démarrage, seulement après cette exécution initiael, les messages des capteurs modifiés ou ajoutés peuvent être reçus. - m <cr>
réponse: Séquence d'octets comme suit:
m [SIZE] [ [MODUL] [DATA_HIGH] [DATA_LOW] ] <cr>
Cette commande interroge tous les modules de capteurs connectés. Selon le mode de fonctionnement la longueur totale de Réponse varie: binaire: 3 + SIZE * 3, ascii: 4 + SIZE * 6SIZE Nombre total de modules qui sont signalés MODUL Numéro de module. Chaque module comprend 16 bits de capteur. DATA_HIGH 8 bits de poids fort de capteurs DATA_LOW 8 bits de poids faible de capteurs - X <cr>
réponse: X <cr>
Cette commande termine l' émulation HSI88 et retourne à la configuration de l'interface. Cette commande n'est pas disponible sur l'original HSI88. - Initial message
Séquence d'octets comme suit:
i [SIZE] [ [MODUL] [DATA_HIGH] [DATA_LOW] ] <cr>
Ces messages initiaux sont envoyés spontanément et signalent seulement les modules qui sont changés. Selon le mode de fonctionnement la longueur totale de Réponse varie: binaire: 3+SIZE*3, ascii: 4+SIZE*6SIZE Nombre total de modules qui sont signalés MODUL Numéro de module. Chaque module comprend 16 bits de capteur. DATA_HIGH 8 bits de poids fort de capteurs DATA_LOW 8 bits de poids faible de capteurs
Une commande ou un Réponse se terminent toujours par <cr> (pas <lf>). Les commandes suivantes sont disponibles:
Commands in RC-Talk-Emulation
-
!!! text manquant ici!!!