OpenDCC GBM-Boost, BiDi-Belegtmelder / Booster / Zentrale
- Was bedeuten diese Channels bei railcom?
Es gibt bei Railcom 2 Antwortkanäle:
- Channel 1: hier sendet jeder Lokdekoder seine Adresse aus, die Aussendung erfolgt ständig.
- Channel 2: hier sendet nur der angesprochene Lokdekoder eine Nachricht oder Quittung, die Aussendung erfolgt immer genau
nach einem Befehl an diese Lok.
Die Aussendung auf Channel 1 und Channel 2 kann über CV28 eingestellt werden.
Manche modernen Dekoder beherrschen auch das dynamische Wechseln zwischen den Kanälen. Wenn der Dekoder adressiert wird,
sendet er die Antwort in Channel 2, wenn er nicht adressiert wird, sendet er die eingestellte Adresse auf Channel 1. Das hat
den Vorteil, dass der Channel 1 für 'Anmeldevorgänge' frei bleibt.
- Wenn ich es richtig verstanden habe, kann ich dann bei nur Meldung im Kanal 1, jeweils nur eine Lok im Überwachten Abschnitt fahren lassen?
Fahren lassen kann man mehr Loks, auch innerhalb eines Abschnittes, das ist vollkommen unabhängig von Railcom. Es gibt
aber Unterschiede in der Rückmeldung, der GBM16T reagiert dabei so:
- Wenn keine Lok railcom sendet, gibt es nur eine Belegtmeldung.
- Wenn genau eine Lok im Channel 1 sendet, dann gelingt eine Channel 1 Erkennung und diese Adresse wird gemeldet.
Egal ob diese Lok alleine oder zusammen mit einer 'nicht-railcom'-Lok unterwegs ist.
- Wenn mehr als eine Lok im Channel 1 sendet, dann misslingt die Channel 1 Erkennung und
es gibt nur eine Belegtmeldung (sofern nicht Channel 2 einspringt).
- Wenn eine oder mehr Loks in Channel 2 senden, werden diese gemeldet
(sofern nicht schon durch Channel 1 gemeldet wurde)
Also: Adressmeldung mit Channel 2 gelingt immer, bei Channel 1 muß eine Lok alleine in diesem Abschnitt senden.
- Kann ich mit dem GBMBoost auch eine Lok ohne railcom betreiben?
Wenn ein Dekoder kein Railcom kann, so kann er trotzdem ganz normal betrieben werden. Eine Ansteuerung und Belegtmeldung
ist problemlos möglich.
- Warum sollen bei railcom überall lokale Detektoren eingebaut sein?
Railcom ermöglicht die automatische Erkennung von Aufgleisrichtung und Lok. Des weiteren kann man die Lok überall
auf der Anlage programmieren, zu Umstellen einer CV muß man nicht auf ein spezielles Programmiergleis. Neuere Railcom-Funktionen
wie dirty-Track und Lokausfallerkennung erfordern auch flächendeckende Detektoren.
- Was bedeutet die Richtung?
Man muss erst mal prinzipiell zwei Dinge unterscheiden: Fahrtrichtung und Aufgleisrichtung.
Die Fahrtrichtung wird bezogen auf das Fahrzeug angegeben, also 'vorwärts' ist Fahrt in Richtung Schornstein
bzw. Führerstand 1. Diese (lokbezogene) Fahrtrichtung ist fest von Fahrregler vorgegeben
und wird nicht vom GBM16T ausgewertet.
Die Aufgleisrichtung gibt an, wie die Lok bezogen auf Gleis steht. Diese Information wird
vom GBM16T anhand des Stromflusses gewonnen.
Ein gesetztes Richtungsbit bedeutet, dass die Lok mit Ihrer linken Seite (bei Blickrichtung in Fahrtrichtung 1)
mit der Gleisseite verbunden ist, in welcher der Detektor installiert ist. An der linken Seite ist bei
Verdrahtung mit NEM-Farbe der Radschleiferanschluß in schwarz (rechts ist rot).
Das Richtungsbit ist also auch davon abhängig,
in welcher Gleisseite der Detektor installiert ist.
Das gesetzte Richtungsbit wird in den Debugausgaben als '-' oder '^' angezeigt, ein nicht gesetztes Richtungsbit
als '+' oder 'v'.
- Kann ich das System mit der Uhlenbrock IB-II verwenden?
Die Signalquelle muß reines DCC erzeugen, hierzu muß man die Intellibox2 wie folgt konfigurieren:
- Intellibox II neu starten
- Grundeinstellungen - Zurücksetzen Konfiguration
- Grundeinstellungen - Sonderoption 907 = 4
- Grundeinstellungen - Sonderoption 25 = 1
- Grundeinstellungen - Sonderoption 904 = 16 (Anzahl der Preamblebits)
- Grundeinstellungen - Lokdatenfomat = DCC
- Grundeinstellungen - Weicheneinstellungen - allg. Datenformat = DCC
- Grundeinstellungen - Zurücksetzen Weichen-Datenformat
- Grundeinstellungen - Zurücksetzen Lok-Datenformat
- Intellibox II vom Trafo trennen und 10 min warten
- Intellibox II starten. - Nun reiner DCC Betrieb ! -
- Wie kann ich die Software am GBMBoost Master akutalisieren?
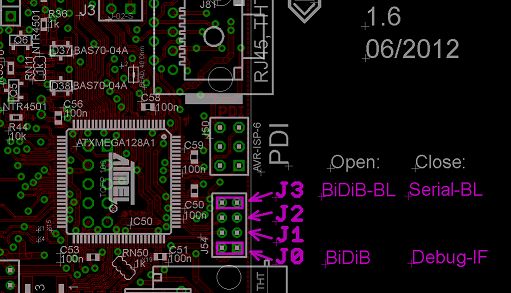 Der Bootloader ist für GBMBoost-Node und -Master identisch. Er kennt zwei Betriebsarten.
Welche Betriebsart gewählt wird, wird über den Jumper J54, Position J3 festgelegt. Wenn die Position J3 gesteckt ist,
dann geht der Bootloader in den seriellen Mode. Fehlt J3, geht der Bootloader in den BiDiB-Mode.
Am Master muß der serielle Mode verwendet werden.
Der Bootloader ist für GBMBoost-Node und -Master identisch. Er kennt zwei Betriebsarten.
Welche Betriebsart gewählt wird, wird über den Jumper J54, Position J3 festgelegt. Wenn die Position J3 gesteckt ist,
dann geht der Bootloader in den seriellen Mode. Fehlt J3, geht der Bootloader in den BiDiB-Mode.
Am Master muß der serielle Mode verwendet werden.
- Seriell über USB. Am Master zu verwenden. J54.J3 gesteckt.
- Über BiDiB. Am Node zu verwenden. J54.J3 offen.
Dann muß man den Bootloader noch dazu bringen, nicht durchzustarten und die Applikation anzuspringen,
sondern im Bootloader zu bleiben: dazu muß beim Starten der Taster gedrückt sein und gedrückt gehalten werden, bis
eine LED aufleuchtet. Es reicht, wenn nur USB angesteckt wird, der Fahrstrom braucht nicht eingeschaltet zu sein.
Jetzt verbinden mit hterm, 19200, 8N1, newline mit <cr>.
Testhalber mal ein ?<cr> an den Bootloader schicken - wir bekommen die Antwort: Bootloader V*.*
Nun gibt drei Kommandos:
- e<cr>: EEPROM als Ziel auswählen
- f<cr>: FLASH als Ziel auswählen
- x<cr>: beenden
Nach der Wahl eines Zieles wird einfach mit der Send-File Funktion von hterm die entsprechende hex-Datei
an den GBMBoost gesandt. Je Zeile antwortet der GBMBoost mit einem '.';
Dateien mit der Endung 000.hex sind für das Flash, .001.hex für das EEPROM.
- Die Temperatur ist bei mir ungenau!
Die Temperatur wird mit dem integrierten Temperatursensor des Atxmega gemessen, dieser ist allerdings nicht sonderlich
exakt, das Datenblatt gibt +/-15° an. Man kann mit der CV23 diese Messung nachjustieren. Hierzu wird in CV23 eine Zahl
hinterlegt, welche auf die Messung draufaddiert wird. Beispiel: CV23 = 3; Chipmessung 18°; Anzeige dann 21°. CV23 ist eine
Byte-Zahl, negative Werte kann man auch als 255, 254, 253 usw, angeben, was -1, -2, 3, usw entspricht.
- Wie kann ich den GBM16T in den Bootloader bringen?
Beim Starten des Prozessors muß die Taste unten am Platinenrand gedrückt sein. Wenn man den GBM16T nicht gut vor Ort einschalten kann,
dann kann man zum Prozessorstart auch einen Reset auslösen. Hierzu kurz die 'gelbe' Brücke von Reset nach Masse herstellen (z.B. mit einer Pinzette)
Bild
- Wie verhält sich der GBMBoost, wenn an der angeschlossenen Multimaus die Stop-Taste gedrückt wird?
Bei der Multimaus kann man die Aktion für die Stoptaste in der Multimaus selbst konfigurieren. Entweder Lokhalt oder DCC-Abschalten.
- Kann ich POM Read auch bei Accessory machen?
Ab Version 2.06.02 des GBM16T ist POM Read auf Accessory möglich. Erforderlich ist aber, dass der Dekoder auch Railcom
kann und entsprechend konfiguriert ist. Den ESU Switchpilot muß man z.B. zuerst mittels POM-Write CV29=136 und CV28=6
dazu überreden, Railcom zu senden.
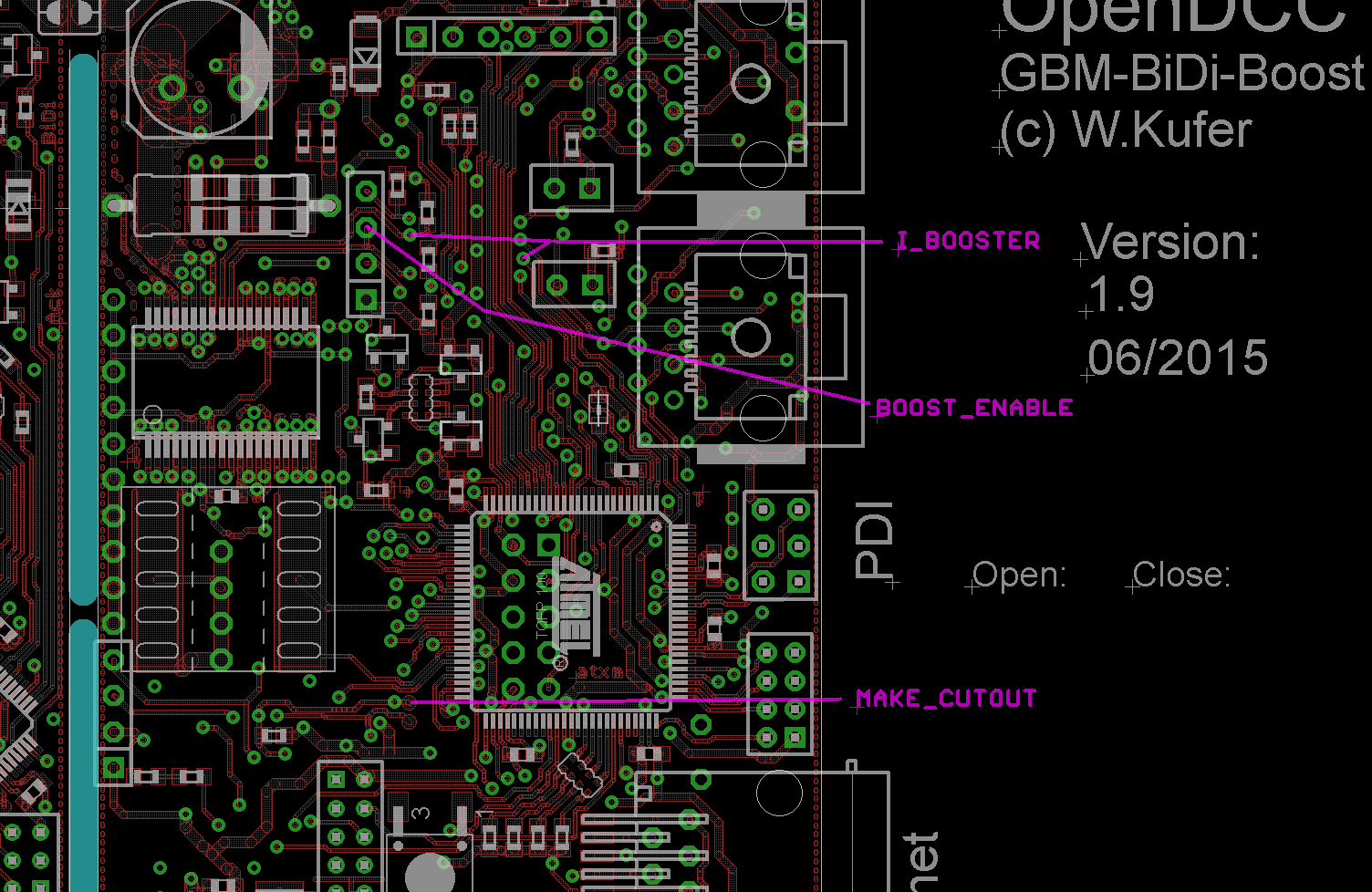
- Ich habe einen Defekt, wo kann ich was nachmessen?
Die folgenden Graphiken zeigen Meßpunkte:
- Booster:

MAKE_CUTOUT: dieses Signal ist high (3,3V), wenn die Cutout eingeschaltet wird.
BOOST_ENABLE: dieses Signal ist high (3,3V), wenn der Boosterchip an ist.
I_BOOSTER: das Strommessignal des Boosters. Etwa 1V/5A, der exakte Messwert wird justiert.
- Railcom wird bei mir nicht erkannt, warum?
- Hier gilt es zuerst zu klären, ob auch eine Cutout am Gleis vorhanden ist:
Leuchtet am GBM16TS die orange 'Railcom/Bidi' LED? Die sollte so wie DCC (grün) auch 'flimmern'. Wenn das nicht
leuchtet, muß die Einstellung der Gleisausgabe kontrolliert werden.
- Wenn ja, flimmert die Belegtmeldung auch oder ist konstant an? Wenn es nicht flimmert, sendet der Dekoder
keine Railcom-Nachrichten.
- Wenn es flimmert, werden die Daten auch zum PC geschickt. Ist dort der Melder richtig zugeordnet?
- Ich habe einen DCC-Logger und sehe eine Lok 3 mit Geschwindigkeit 0. Warum?
Wenn keine Lok aktiv ist, dann 'erfindet' der GBMBoost einen Fahrbefehl für die Lok 3 mit Geschwindigkeit 0 (FS28).
Damit wird es beliebigen Loks ermöglicht, eine Railcom-Channel 1 Antwort zu senden und eine neue
Lok wird erkannt.
Neben der von der Änderung der Fahrstufen abhängigen Priorisierung der Ausgabe (bremsende Loks werden bevorzugt),
ist auch eine Durchsatzoptimierung der Befehl an Loks abhängig von Ihrer Geschwindigkeit eingebaut.
Wenn diese Durchsatzoptimierung keine fahrende Lok findet, dann wird auch Lok 3 mit Geschwindigkeit 0 augegeben.
- Beim Wechsel von einem Booster zum nächsten Booster wird mit Kurzschluß abgeschaltet
An Boostergrenzen müssen beide Schienen des Gleises galvanisch getrennt sein. Das bitte zuerst nachprüfen.
Die nächste Prüfung richtet sich auf die Gleisverdrahtung (Polarität): man testet an der Überfahrtsstelle z.B. mit einer
Glühbirne oder Voltmeter, ob auf beiden Seiten die gleiche Polarität anliegt.
Sind diese Prüfungen okay, kann es trotzdem noch zu einer Abschaltung kommen. Diese ist bedingt durch die Art der Last
(Dekoder, Einschaltstromspitzen), Verdrahtung (Leitungslängen) und auch Exemplarstreuungen des Boosterchips. Als problematisch
hat sich der Zeitpunkt des Wiedereinschaltens von DCC nach der Railcom-Cutout erwiesen. Die Abschaltung
erfolgt, wenn die Einschaltstromspitze an diesem Zeitpunkt 12A übersteigt.
- Wie ensteht diese Einschaltstromspitze?
Während der railcom-cutout läuft die dekoderinterne Datenverarbeitung weiter und benötigt Strom. Dadurch sinken
die Spannungen an den dekoderinternen Abblock-Kondensatoren. Am Ende der Cutout müssen diese dann wieder befüllt werden.
Je stärker die Spannung absinkt, umso größer ist die Einschaltstromspitze.
- Was kann man gegen diese Einschaltstromspitze tun?
- größere Kondensatoren auf dem Dekoder hinter dem Gleichrichter verwenden bzw. Zusatzkondensatoren auflöten.
Die Spannung sinkt dann nicht mehr so weit ab und und die Einschaltstromspitze wird kleiner.
- Einbau eines stromdämpfendes Element in der Zuleitung von Radschleifer zu Dekoder. Eine Spule im Bereich 330nH bis 1uH
bremst den Einschaltstrom wirksam und hilt auch allgemein zur Entstörung. Gut konstruierte Lokomotiven haben sowas
vorgesehen - z.B. ein Roco Glaskasten.
- Einbau eines stromdämpfendes Element in der Ausgangsleitung des Boosters. Auch hier bremst eine Spule im Bereich 330nH bis 1uH
den Einschaltstrom wirksam. Diese Spule muß aber für den maximalen Strom des Boosters (4A) ausgelegt sein.
- Verlängerung der Leitung zwischen GBMBoost und GBM16T: eine Leitung von ein paar Metern hat induktiven Charakter und
wirkt wie eine Spule - siehe Punkt c). Ebenso wirkt ein kleiner Wickel: eine Spule mit 3 Windungen und 50mm Durchmesser
kommt auf knapp 1uH Induktivität.
- Warum tritt das nur an der Boostergrenze auf?
Es tritt auch innerhalb eines Boosterbezirkes auf. Der Boosterchip versucht, mittels 'Stottern' (PWM-Betrieb), diese
Überlast von über 12A wegzubringen. Das gelingt in der Regel.
Bei Überfahrt über eine Boostergrenze geht ein Boosterchip in PWM-Betrieb, der andere nicht. Durch das Fahrzeug ist aber
eine echte Verbindung der Ausgänge da und durch den PWM-Betrieb kommt es zum Gegeneinander-Arbeiten von zwei FETs,
was in Folge zur Kurzschlußabschaltung führt.
History
- GBM-Boost (Master):
- V2.07.04
25.09.2020 2.07.01 LOCAL_PONG mit msg_num=0.
29.12.2020 2.07.02 kleinere Optimierungen im DCC Stack.
12.01.2021 2.07.03 Multimaus (ab Mausversion 1.05): Funktionen bis F28
12.01.2021 2.07.04 Zu/abschaltbare DCC-Pause bei Wechsel in den Programmiermode (CV90)
- V2.07.00
13.07.2020 Änderung: Bei Booster OFF werden beide DCC Leitungen freigeschaltet.
- V2.06.01
15.03.2020 Änderung: Sperrinterval für Confidence-Meldungen auf 400ms erhöht
25.02.2020 Ergänzung: Zusätzliche CV zum Ignorieren von Hardware-Overcurrent (in ms); damit kann man kapazitive
Lasten beim Power-Up überwinden.
- V2.05.02
24.01.2020 Ergänzung: Beschränkung der Boostereinschaltversuche auf 3. Das bisherige Verhalten
kann mit CV91=250 wieder hergestellt werden.
- V2.05.01
22.01.2019 Bugfix Fifofehler (trat auf bei massiver Busbelastung - viele Knoten und gleichzeitiges Lesen von allen Knoten)
- V2.05.00
01.12.2018 Diverse kleinere Bugfixes und Optimierungen:
- MS_CS_QUERY Antwort verbessert
- DCC Binstates gemäß RCN (wird 3* wiederholt)
- Bei neuer Lok könnte fälschlicherweise die Funktionen der alten Lok wiederaufgenommen werden
- Optimierung Lokstack (back-2-back, Abblenden von Speedbefehle für Loks mit Speed 0)
- Erhöhung des Timeouts am Xpressnet (Umschiffung eine Multimausproblems)
13.10.2018 Handreglerkontrolle vom Lenzregler auch für Weichen über 512 unterstützt.
Der Schaltzustand wird allerdings nicht zentralenseitig gespeichert,
sondern alle Weichen teilen sich eine gemeinsame Statusvariable.
Die im Handregler initial dargestellte Postion (für Weiche mit Adresse > 512) kann daher von der aktuellen Stellung der Weiche abweichen.
- V2.04.07
27.04.2018 Erhöhung der Preamblebits im Servicemode auf 25. Damit ist dann auch Viessmann programmierbar.
12.02.2018 Ausgabe Modellzeit auf Xpressnet und DCC; wenn die Zeit von Host nicht mehr upgedated wird, dann übernimmt
der GBMBoost nach 2 Modellbahnminuten das Aussenden der Zeit. Die Aussendung ist per CV abschaltbar.
- V2.04.03
02.02.2017 Added BiDiB System Time
26.04.2017 Ergänzung bei SECACK: nach 4 Wiederholungen werden die Wiederholungen abgebrochen und eine Fehlermeldung abgesendet.
- V2.04.00
28.11.2016 Bugfix: Unter bestimmten Lastbedingungen des GBMBoost kann ein DCC-Befehl versehentlich
zu oft ausgegeben werden - mit schädlichen Auswirkungen auf den DCC-Durchsatz, die Reaktionszeit
auf Befehle und auf Railcom-Erkennung, wenn nur Channel 2 aktiviert ist.
Ein Update wird empfohlen.
- V2.03.02
12.07.2016 Konsolidiertes Update (nach diversen Tests zur Optimierung des Boosterabschaltens, gegenüber 2.02.07 keine
wesentliche Änderung)
- V2.02.07
28.02.2016 Geändertes Integrationsverhalten der Kurzschlußerkennung - das reagiert jetzt träger und ignoriert
kleinere, durch Dekoder verursachte Stromspitzen. (Diese sollten aber trotzdem besser verbraucherseitig behoben
werden! Z.B. durch Entfernen zu groß dimensionierter Entstörkondensatoren direkt über dem Motoranschluß ...)
- V2.02.06
17.12.2015 Anpassung, um vorinstallierte Lenz-Lokomotiven mit nicht normkonformer Adressvergabe
(Übergang kurze/lange Adresse erfolgt bei 100 statt bei 128) trotzdem anprechen zu können.
- V2.02.05
12.12.2015 In der V2.02.04 hatte sich eine Debug-Ausgabe eingeschlichen, welche die flüssige Kommunikation behinderte.
- V2.02.04 (zurückgezogen)
03.12.2015 Bugfix im Interruptmanagement: unter bestimmten, seltenen Randbedingungen konnte der BiDiBus zu spät auf
RX umgeschaltet werden und dadurch eine Nachricht eines untergeordneten Knotens beschädigt werden.
Der DRE-Interrupt wurde um eine Stufe höher priorisiert.
26.08.2015 Bugfix im DCC Optimizer: unter bestimmten Randbedingungen konnte ein Funktionsbefehl der Funktionen
F21-F28 falsch zugeordnet werden.
27.03.2015 Sofern Booster vom PC aus abgeschaltet wurde, kann jetzt auch von der Multimaus wieder eingeschaltet werden.
27.03.2015 Im Kurzschlußfall kann mit Taster der Booster dauerhaft abgeschaltet werden.
- V2.02.03
27.03.2015 LH100 Support auch für Weichen
27.03.2015 Sofern Booster vom PC aus abgeschaltet wurde, kann jetzt auch von der Multimaus wieder eingeschaltet werden.
27.03.2015 Im Kurzschlußfall kann mit Taster der Booster dauerhaft abgeschaltet werden.
- V2.02.02
04.12.2014 hinzu: Temperatur-Offset
04.12.2014 Änderung der Accessory Adressierung, dadurch um 4 verschobene Adressen. Lokadressen bis 127 werden
als kurze Adresse, Lokadressen ab 128 einschließlich als lange Adressen gesendet.
25.09.2014 bugfix: falsche Message-Num bei MSG_BM_DYN_STATE (dirty track)
- V2.01.07
30.07.2014 Handverstellung von Weichen und Fahrbefehle an der Multimaus werden an den Steuer-PC übermittelt.
- V2.01.05
21.04.2014 Unterstützung von Relaisplatinen zur automatischen Umschaltung im Programmiermode.
12.06.2014 Per Feature einstellbarer Startzustand (DCC on/off)
- V2.01.04
16.03.2014 Optimierung und bugfix bei POM: notwendig für die neuen Monitorfunktionen
16.03.2014 Programmiermode (Service Mode) dazu. Hinweis: hierzu wird ein paralleler Update der GBM16T empfohlen.
13.02.2014 Verbesserungen bei den Modes zum Support von legacy PC-Programmen.
10.02.2014 Neu: Weitergabe von DYN-Messages von Lokdekodern ('Gleis-Verschmutzungsmessung').
10.02.2014 Unterdrückung doppelter MSG_CV_POM.
- V2.01.03
Wichtig:
Durch das geänderte Bustiming ist diese FW nicht mehr zur Spec 2013 konform, es müssen alle Knoten (auch die Bootloader der Knoten!)
vorher auf die aktuelle Spec upgedated werden.
Meiner Erfahrung nach kommen aber alle alten Knoten-Firmware noch damit zurecht, trotzdem
empfehlen ich dringend den vorherigen Update der angeschlossenen Knoten.
04.12.2013 Neu dazu: Userstring.
27.12.2013 Das Timing am BiDiBus (Wechsel auf RX nach einer Tokenaussendung) ist leicht
verzögert (ca. 500ns), damit werden Störungen durch längere Kabel und
Treibermix (verschiedene RS485-Bausteine) unterdrückt.
20.12.2013 Das Abschaltverhalten des Boosters wurde etwas weniger vorsichtig gestaltet,
der Booster versucht jetzt stärker, auch mal gegenüber einer widerspentigen
Last Recht zu behalten.
04.12.2013 Bugfix bei der Adressierung von extended Accessory > 63.
25.01.2014 bekannter Mangel: Feature SECURE_ACK aktuell fest auf 300ms, nicht variabel.
- V2.00.07
27.06.2013 Watchdog per Default auf 0.
18.06.2013 Optimierung Gleisausgabe: Funktionspakete werden nur ausgegeben, wenn diese vom Host angefordert werden.
18.06.2013 Erweiterung mit einer Watchdogfunktion: bei Verbindungsverlust (z.B. Absturz des Hostprogrammes) wird optional
ein kontrollierter Nothalt durchgeführt.
08.06.2013 Änderung im Boosterverhalten:
- Bei Fehler in der H-Brücke wird die Strommessung kurz unterbrochen (und bringt damit keine Ausreisser mehr)
- Das ON / OFF Verhalten optimiert: ON wird erst nach 50ms Betrieb unterhalb der Stromgrenze als gültig angenommen.
- Die Nachrichten zum Host bereinigt, diese werden gefiltert und ein Überfluten des Hosts vermieden.
- V2.00.05
10.05.2013 bugfix: im Downstream konnte es unter bestimmten, zufälligen Bedingungen zum Verlust eines Paketes kommen.
06.05.2013 bugfix: beim Lesen von CV via BiDiB konnte sporadisch ein falsche Antwort kommen.
- V2.00.04
19.04.2013 geänderter Defaultzustand beim Booster (jetzt off), damit wird versehentliches DC während des
Einschaltens am Gleis vermieden.
- V2.00.03
10.04.2013 Weichenmanager neu dazu - damit Ansteuerung von Accessory über die DCC-Funktion als BiDiB-Begriff möglich.
- V2.00.01
16.03.2013 Bugfix bei DCC für Accessory
Strom, Spannungs- und Temperaturmessung neu dazu
- V2.00.00
16.02.2013 Neues Interface zum GBM16T (erfordert eine GBM16T-Version > 2.x)
Boosterbetrieb dazu
Zentralenfunktion dazu
Fahren mit Xpressnet-Handreglern
Externer Notaus-Taster und Zustandsanzeige mit externen LEDs
Unterstützung atxmega128a1u
Seriennummer wird permanent abgelegt (in der sog. USER SIGNATURE)
- V1.04.00: Mehrfachbelegungen auf Abschnitt können gemeldet werden.
Wichtig: ab dieser Version ist eine GBM16T-Version > 1.2 erforderlich.
- V1.3.9: Dauerfeuer auf CONFIDENCE bei Aktivierung von DCC und Railcom behoben
- GBM-Boost (Node):
- V2.07.00
13.07.2020 Änderung: Bei Booster OFF werden beide DCC Leitungen freigeschaltet.
- V2.06.03
15.03.2020 Änderung: Sperrinterval für Confidence-Meldungen auf 400ms erhöht
25.02.2020 Ergänzung: Zusätzliche CV zum Ignorieren von Hardware-Overcurrent (in ms); damit kann man kapazitive
Lasten beim Power-Up überwinden.
- V2.06.02
20.01.2020 Neu: Einstellbare Anzahl an Booster-Retries. D.h. der Booster versucht bei einem Kurzschluß eine einstellbare
Zahl von Wiedereinschaltversuchen, klappt es nicht, geht er auf 'abgeschaltet'. Die Zahl ist über eine CV einstellbar von 0.. 249.
Ab 250 wird unendlich oft versucht.
- V2.05.00
18.07.2018 Neu dazu: Railcom-Distanzmessung
- V2.04.02
26.11.2017 Bugfix: Verbesserung der Anmeldeentzerrung verhindert LOGON-Probleme bei größeren Anlagen.
- V2.04.01
26.04.2017 Ergänzung bei SECACK: nach 4 Wiederholungen werden die Wiederholungen abgebrochen und eine Fehlermeldung abgesendet.
- V2.04.00
24.04.2017 BiDiB Systemzeit; bugfix fuer Absturz bei Dyn-Nachrichten mit großen negativen Werten. Update empfohlen.
- V2.03.02
12.07.2016 Konsolidiertes Update (nach diversen Tests zur Optimierung des Boosterabschaltens, gegenüber 2.02.14 keine
wesentliche Änderung) ; Bugfix bei der Zuordnung Confidence zu Belegtmeldern - nur relevant, wenn die
Belegtmelder nicht in Reihe gesteckt werden.
- V2.02.14
28.02.2016 Geändertes Integrationsverhalten der Kurzschlußerkennung - das reagiert jetzt träger und ignoriert
kleinere, durch Dekoder verursachte Stromspitzen. (Diese sollten aber trotzdem besser verbraucherseitig behoben
werden! Z.B. durch Entfernen zu groß dimensionierter Entstörkondensatoren direkt über dem Motoranschluß ...)
- V2.02.11
28.06.2015 Vorbereitung Railcomplus.
27.03.2015 Im Kurzschlußfall kann mit Taster der Booster dauerhaft abgeschaltet werden.
28.01.2015 Bugfix Sequenznummer bei POM Antwort.
- V2.02.10
09.01.2014 Bus-Optimierungen für besonders große Netze
04.12.2014 hinzu: Temperatur-Offset
- V2.02.00
16.09.2014 Bugfix: avoid possible permanent sleepmode of processor
- V2.01.00
16.03.2014 Optimierung und bugfix bei POM: notwendig für die neuen Monitorfunktionen
10.02.2014 Unterdrückung doppelter MSG_CV_POM.
- V2.00.16
Auswertung CV18
- V2.00.06
13.01.2014 Bei erfolgter Verbindung zum BiDiBus werden die Belegtzustände aller GBM16T sicherheitshalber aktualisiert.
10.02.2014 Neu: Weitergabe von DYN-Messages von Lokdekodern ('Gleis-Verschmutzungsmessung').
29.12.2013 MSG_STRING neu dazu
- V2.00.05
10.05.2013 bugfix: beim Lesen von Knoten-CV via BiDiB konnte sporadisch ein falsche Antwort kommen.
- V2.00.04
19.04.2013 geänderter Defaultzustand beim Booster (jetzt off), damit wird versehentliches DC am Gleis vermieden.
- V2.00.01
16.03.2013 Bugfix beim Busbetrieb
Strom, Spannungs- und Temperaturmessung neu dazu
- V2.00.00
16.02.2013 Neues Interface zum GBM16T (erfordert eine GBM16T-Version > 2.x)
Boosterbetrieb dazu
Externer Notaus-Taster und Zustandsanzeige mit externen LEDs
Unterstützung atxmega128a1u
Seriennummer wird permanent abgelegt (in der sog. USER SIGNATURE)
- V1.04.00: Mehrfachbelegungen auf Abschnitt können gemeldet werden.
Wichtig: ab dieser Version ist eine GBM16T-Version > 1.2 erforderlich.
- GBM16T:
- V2.07.07
17.01.2020: V2.07.07 Changed default for SECACK_ON from 1 to 50
26.05.2019: V2.07.05 Genauere Fehlermeldung bei Sequence
19.03.2019: V2.07.03 Removed Accessory for Reverser
10.03.2019: V2.07.02 Bugfix: Eine Folge von DCC-Accessory+DCC lange Adresse + Railcom Dyn kann eine falsche Adresserkennung verursachen.
12.08.2018: V2.07.00 Neu: Millimetergenaue Streckenmessung.
- V2.06.04
19.04.2017: Bugfix im Reverser (dieser hatte sich in der 2.06.00 eingegeschlichen), bugfix im Decoding von consist-Adressen
- V2.06.03
23.03.2017: Neu: CV40: damit stellt man den verwendeten Eingang für Accessory ein. Der GBM16T schaltet dann bei Accessorybefehlen
diesen Kanal auf alle Fälle in die Auswerteliste rein.
- V2.06.02
23.03.2017: Neu: POM für Accessory
- V2.06.01
08.03.2017: hinzu: extra Backup-Speicher für Adjustmentdaten, einstellbares DYN_STATE-Interval
- V2.05.01
13.01.2017: Zurücksetzen des Channel 1 Entprellers, wenn eine Kollision erkannt wird.
- V2.4.3 (beta)
20.02.2016: DCC Addr 1 wirkt nicht mehr auf den Reverser.
20.02.2016: Logging des Reversers reduziert - possible overrun in debug-if
10.01.2015: Vorbereitung weitere Railcom-Dekodierungen
- V2.2.0 (beta)
20.10.2014 Ersatzmessung modifiziert, damit empfindliche Dekoder nicht fälschlich Analogmode erkennen.
- V2.1.1
17.04.2014 ID01 und ID02 (Channel 1 Nachrichten) werden im Channel 2 als Geistermeldungen interpretiert und verworfen. Damit
lösen inkompatible Dekoder wie LDG30 und LD-G-32 keine falsche Adressmeldung mehr aus.
- V2.1.0
11.04.2014 Unterdrückung Programmiermodus, wenn der GBMBoost in Programmiermode ist - damit kann man nicht
versehentlich beim Lokprogrammieren den GBM16T mit verstellen.
- V2.0.7
04.01.2014 Neue Auswertefunktion für DCC Quality (Erkennung verschmutztes Gleis)
- V2.0.5
04.05.2013 weitere Ergänzung bei dem Kehrschleifenfunktionen, bugfix bei der Geschwindigkeitsmessung
- V2.0.4
26.05.2013 Zusätzliche Prioritätabschnitte (Beschreibung), um Freigabeprobleme bei komplizierten Schleifenkonstellations zu umgehen.
Bugfix: versehentliches Verstellen der DCC-Adresse behoben.
- V2.0.3
05.05.2013 Erweiterung des Kehrschleifenmoduls um die Möglichkeit, mittels Weichenbefehl das Schalten der Kehrschleife
temporär zu unterbinden. Ermöglicht längere Kehrabschnitte und Weichen in der Zufahrt.
- V2.0.2
20.03.2013 Modifikationen an der Auswerteroutine (insb. hilfreich für ESU Lopi3 und Lopi4, ältere Firmwarestände)
- V2.0.1
09.03.2013 Patch für das Lesen von POM bei gleichzeitiger Speed - behebt ein Problem mit Zimodekodern.
- V2.0.0
16.02.2012 Neues Interface zum Controlproc (erfordert eine Controlprocversion > 2.x)
Zusätzliches Filter gegen Falschmeldung bei mehreren Loks auf dem Gleis
Filter und Glättungsalgorithmus für Geschwindigkeitsmeldungen
Erkennung von bis zu 4 verschiedenen Dekodern auf dem Abschnitt.
Verbesserte Erkennung durch Offsetabgleich (nach Firmware-Update einmalig durchzuführen)
Unterstützung atxmega128a1u
Integrierte Meßstrecke für Geschwindigkeitskontrolle
- V1.2.2: Bis zu 4 Lokomotiven können gleichzeitig in einem Abschnitt gemeldet werden.
Wichtig: ab dieser Version ist eine GBM16Boost-Version > 1.4 erforderlich.
- V1.1.5: bugfix: when a loco leaves a section and comes back and
the section stays occupied (due to cars), it now generates a new address event.
- V1.1.4: fixes problems with A/D converters not in reset state. (not detecting occupancy)
- Bootloader V0.02.00: does no longer access virtual ports, portA and portB are unchanged. Fixes problems with
old GBM16T application firmware.

{kind=link}
{kind=link}