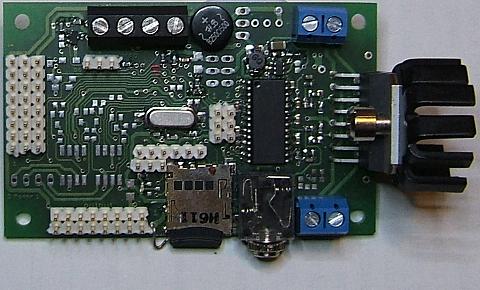
OpenDCC AniMat-S (OpenPlayer)
- In Entwicklung
Eigenschaften
- Prozessor AVR At90can128
- DCC-Eingang inkl. BiDi (Railcom®) Sendestufe
- Steckplatz für MicroSD-Karten
- mp3-Dekoderchip mit integriertem DAC (Stereo)
- 3,5mm Klinkenausgang und/oder Stereo-Endstufe mit 2x10 Watt an 4Ohm, Lautsprecher-Anschluß mit Schraubklemmen
- Doppelte(!) H-Vollbrücke mit Sensoren für Strommessung und Lastregelung (BEMF) zum Anschluß von zwei Motoren oder Steppermotor.
- 8 Schaltausgänge mit ULN2803 (300mA), steckbar mit Standard-Stiften 2,54mm Raster
- 8 Eingänge mit 5V-Versorgungsmöglichkeit (z.B. für Taster, Drehgeber, Sensoren, Lichtschranken), steckbar mit Standard-Stiften 2,54mm Raster
- Displayanschluß für Graphikdisplay 128x64 oder Textdisplay inkl. Schaltregler für die LED Hintergrundbeleuchtung.
- Einspeisemöglichkeit einer zusätzlichen Stromversorgung
- Doppelter Servo Ausgang
- Verlustarme Spannungsregelung mit Schaltreglern inkl. Linearnachregelung für beste Audioqualität, alternativ normaler Längsregler
- Firmware-Update über USB (mittels FTDI-TTL-Kabel), Konfiguration über USB
- CAN oder XPressnet über Aufsteckbaugruppe mit Buchse und Treiber. Realisiert ist das auf 50 x 80mm und einer zweilagigen Leiterplatte unter Verwendung von SMD-Bauteilen bis zu 0603.
AniMat-S beinhaltet sehr viel Intelligenz und arbeitet daher mit einem großen AVR Prozessor. Die Hardware bietet folgende Funktionsblöcke:
Anwendung
-
Mit diesen Funktionsblöcken lassen sich umfangreiche Steuerungsaufgaben innerhalb des Dekoder erledigen. Beispiele:
- SoundDekoder: Es werden mp3-Dateien aus dem internen Speicher des Atmel oder aus der eingesteckten SD Card auf einen DCC-Befehl hin abgespielt.
- Eigenständiger mp3-Player mit Bedienfeld. (OpenPlayer)
- Elektronische Klingel
- Sequenzsteuerungen (das sind kleine Programmabläufe innerhalb des Dekoders)
- Kransteuerungen, mit Eingabe und Überwachung der Kranbahn z.B. mittels Gabellichtschranken.
- Schrittmotoransteuerungen, z.B. für Drehscheiben.
- Komplette Funktionssteuerung von Kirmesmodellen.
- Eigenständige Modellbahn-Zentrale
- Zusammen mit der Xpressnet / CAN Erweiterung ist auch der Einsatz als Bedienpult möglich.
Unterlagen / Links
-
DCC:
DCC Konfigurationsvariablen inkl. CV-Rechner
PID:
PID Code
Regler (wikipedia)
Takahashi (Einstellregeln)
NIBO Robotor, Motorcontroller Motorregelung mit Attiny44 (SRC)
Motor BEMF allgemein
H Brückenansteuerung gut
OpenModelica Simulationssoftware
DingelDein (VS1011-Projekt)
FAT: Holger Klabunde